
RoboG è l’ evoluzione del gimbal TiU, è un gimbal stand-alone,uno stabilizzatore video a mano pronto all’ uso, progettato per le sony As 15\30 e le gopro2 e 3.

Il suo uso permette di fare delle riprese video stabilizzate a braccio o posizionando la camera su un auto anche in situazioni al limite, per esempio correndo con la camera in mano. Inoltre con il RoboG si può manualmente modificare l’ inclinazione della camera attraverso il joystick, in modo da avere il target sempre nell’ obiettivo anche modificando in altezza il punto di ripresa. Il tutto è progettato per essere stampato in abs con stampante 3d.
Un test del RoboG su supporto auto
https://www.youtube.com/watch?v=6Yt049WjZMQ
L’ uso dello stabilizzatore Robog è semplice e rapido, si inserisce bloccandola nel suo box la camera si accende l’ interruttore, si attende circa una quindicina di secondi che il controller esegua il setup iniziale dei sensori dell’ imu ( i motori si muovono portando la culla della cam in posizione orizzontale) e si può iniziare a riprendere.


La parte relativa all’ elettronica è composta da un controller martinez con la sua imu che ha un sensore giroscopico e un accellerometro, con firmware brugi 161r modificato per ricevere il segnale analogico del joystick. Un joystick analogico per la modifica manuale dell’ inclinazione del camera sull’ asse del tilt. Un’ interruttore con led che ne visualizza la funzionalità, una lipo 3s da 450mah con un’ operatività di circa un’ ora.
La scheda di controllo la si può interfacciare al pc tramite la porta minusb e il suo software GUI per la modifica dei parametri di assetto.
Il progetto parte da un nucleo di base che è il gimbal per multirotori,



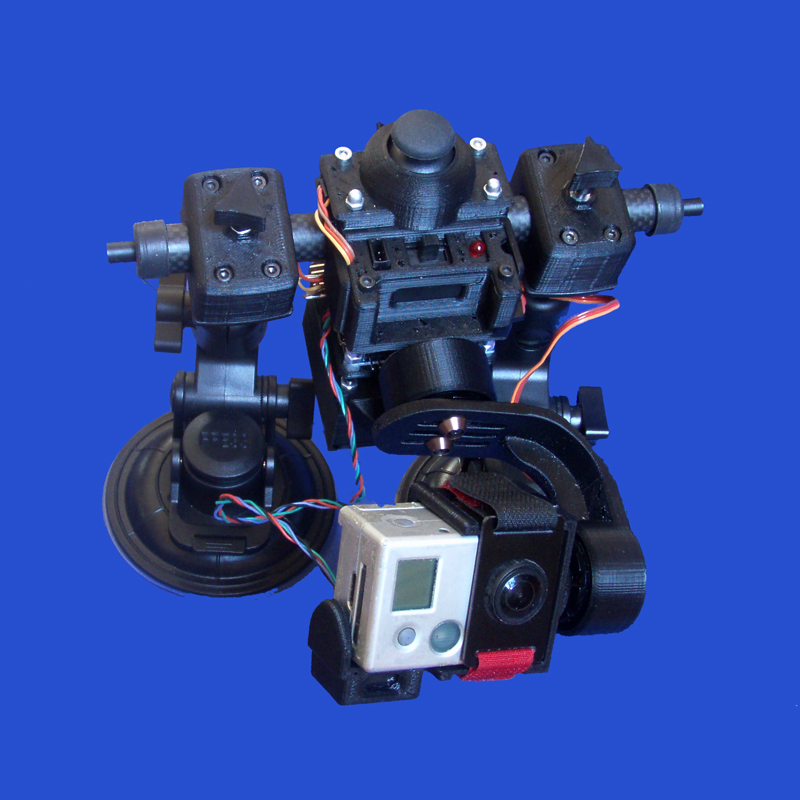
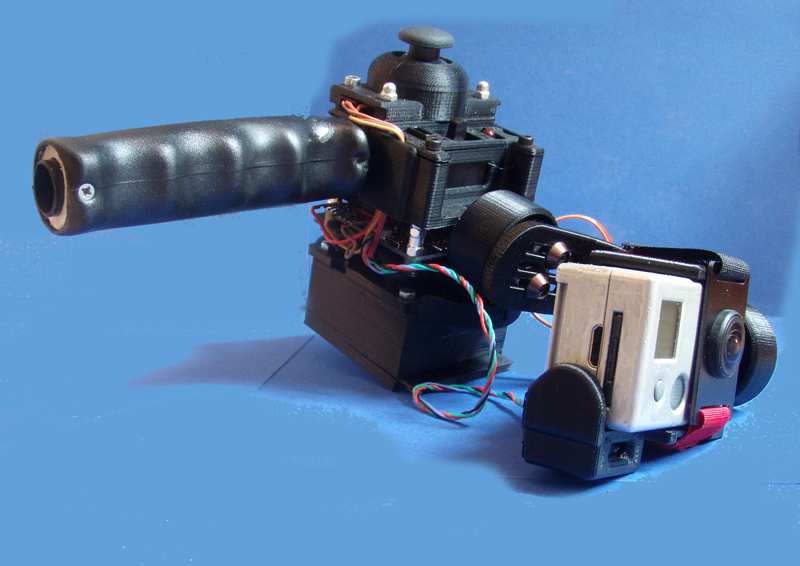
la successiva evoluzione per un uso a mano o su mezzi di trasporto terreni è costituita da un blocco centrale a cui si ancora l’ attacco della maniglia x un uso a mano oppure le due ventose x farlo aderire a qualsiasi piano liscio(carrozzeria, carenature moto ect.), inoltre visto che sia la sony che la gopro3 hanno il wi-fi che permette di visionare le riprese in realtime, ho disegnato un supporto x ancorare al tubo di carbonio un porta cellulare.





I file di stampa 3D del progetto li ho condivisi sul sito www.thingiverse.com, seguendo questo link potete accedere ai download dei file: https://www.thingiverse.com/thing:408678
Sempre al link esposto potete trovare un file pdf che spiega in sommi capi il montaggio del corpo centrale e indica dove acquistare il materiale elettronico utilizzato.




un test video dello stabilizzatore usato a braccio
https://www.youtube.com/watch?v=zXXfUm9K2go